
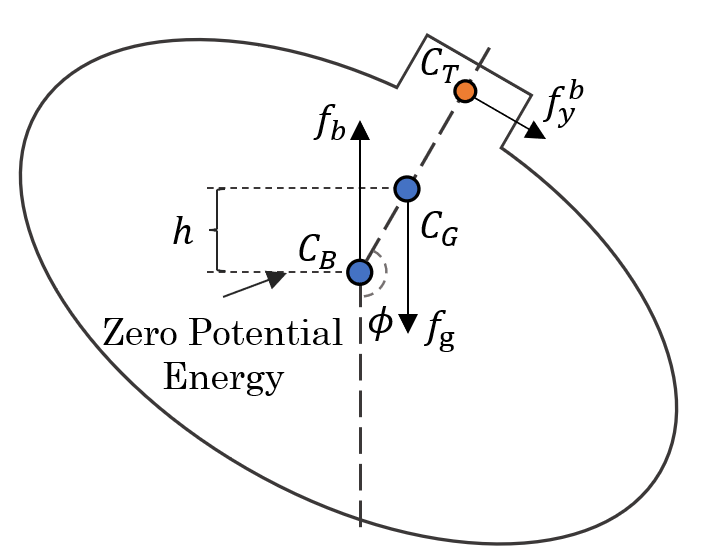
In this work, we design an energy-shaping controller to swing up the blimp from the standard bottom-heavy pose to the inverted unstable state. Then, a stabilizing controller is applied around the unstable equilibrium to keep the blimp in the inverted hovering mode.
Video Demo: