
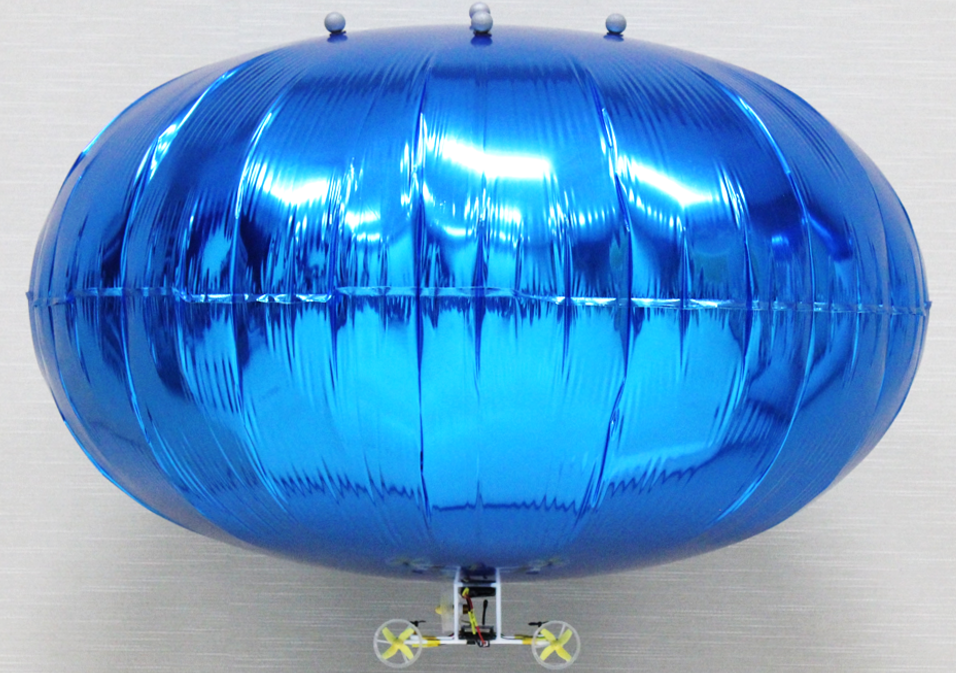
In this work, we present the development of both the hardware system design and the swing-reducing controller design for the Georgia Tech Miniature Autonomous Blimp (GT-MAB).
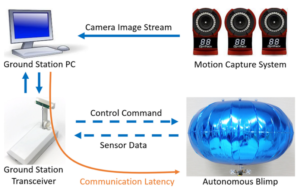
The entire system employs an offline control strategy. The motion capture (mocap) system streams state data of the blimp to the ground station PC, where all controller calculations are performed. Control commands are then wirelessly transmitted to the GT-MAB via the ground station transceivers to achieve autonomous flight.
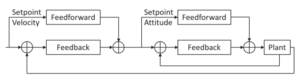
A nested-loop controller is applied to the GT-MAB to realize the swing-reducing flight. The inner loop controls the attitude of the blimp while the outer loop adjusts the setpoint attitude for velocity tracking. The feedforward components in both loops keep the blimp flying at the operating point.
Video Demo: